
GNSS��Զ�λ������ϵͳ���
ʱ�䣺2012-10-15����� �����α༭���Ĵ���ͼ�������
����ۡ�������2000��ǰ���� ����һ��GNSS�ο�վ�������CORS���Լ�2006��㶫���ɹ��ڵ�һ������ȫʡ��CORS��������������з���Χ�㡢��Ͷ�١��۲�ʱ��̡����ȸ� ���ŵ㣬����ȫ�����и�ҵ�㷺�������ݹ��ƣ���2008��ף�ȫ���ѽ��ɴ��СС��100��CORS�������ҹ����ʷ��ʵ�����˳ɾ͡�
�ھ�����Զ�λ�У�����Ҫ��ϵͳ��� �ɸŷ�Ϊ�����ࡣ��һ������������������Ͷ��������������ͨ����Զ�λ���ܹ����������ǣ�ʣ�µIJ��������ͬ����������������ڶ��� �������ྶ����������λ���ı仯����������������ij����ء����С��ȫȡ���ڲ�վ��Χ�ĵ��Ρ�������������ܵ����ӡ�
���ļ���������ϵͳ���Ĺ������о��ɹ����Լ�������ҵ���������п��ܲ�ȡ��������ʩ��ּ��ȷ��GNSS�ɹ��Ŀɿ��Ժ;�ȷ�ԡ�
������
���ǹ�������ڹ۲������ǣ�������ʵʱ����������Ĺ����У�����Ӱ����λģ��ֵ��ȷȷ������Ӱ������ĵ�λ���ꡣ
1994��ǰ�����õĹ��������GPS���Dz�����“�㲥���”���������Dz�����“������Ϣ”��һ���֡��˵�����Ϣ�Ǹ��ݵ���5�����վ�Ĺ۲�ֵԤ��������������Dz�����1994�꣬IGS������GPS����֣��ṩ��һ��GPS�������������ء�IGS�����Ϊ���֣�
1��IGS���ܹ������1994����7��IGS�����������ϳ�����ۺϹ�����ɷ����������ñ鲼ȫ���30—120������վ��ĿǰIGS���ܹ�����ڹ۲��ս�����11���ṩ���ɸ����ν���ֵͬ���Ͻ���ֵ֮��IJ���ֵ�õ��ģ����ȸ���0.1m��
2��IGS���ٹ�����ɶ���IGS�������ĸ����������ϵ�GPS��������Ԥ�������Ԥ��ÿ�쿪ʼ��30���ӵĹ����ͬ���ܹ����ȣ��侫��Ϊ0.1m��ͬ�㲥���һ������Щ���ǿ��ܳ��ֽϴ��Ԥ����
������ŷһ����վ���������ǣ���IGS���ܹ��֮�������Ƚϵ���ͬһ��������ֵ���ϴ�1����ԭ��������
��1�����ֹ��������λ��m
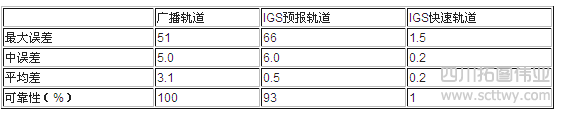
- һ�Ƕ��߲������ֲο�ϵ��IGS����ITRF94���㲥�������WGS84��
- �������ֹ�����õĹ��������ͬ��
- ���DZ��и�ֵ�����������������
�������ڵ�����Ӱ��ͨ�����ʱ���������ֽϴ�������Һ���ģ�⡣������ʿBauersima[2]��Beutler[3]���о���������Ե�λ�����Ӱ��������о��鹫ʽ�����
 ʽ�й�����dOͬ��վ��ƽ������R֮�ȣ����ڻ������dl�Ի��߳���l֮�ȡ��ɴ˿ɼ�������Խ����������Խ����Ҳ��GNSS����ԭ���б߳��˶̲��˳���ԭ��
ʽ�й�����dOͬ��վ��ƽ������R֮�ȣ����ڻ������dl�Ի��߳���l֮�ȡ��ɴ˿ɼ�������Խ����������Խ����Ҳ��GNSS����ԭ���б߳��˶̲��˳���ԭ��
��������
�߳��������50—1000km �Ĵ������Ϊ����㡣���������Լһ�㵥Ƶ����̲�����20km�ľ������ء�������������������ԡ�һ��ɢ���ԣ���������ϵ���ǵ粨Ƶ�ʵĺ��������ǻ� ���ԣ�����۲�ֵ���ز���λ�۲�ֵ�ĵ��������ǣ���ֵ��ͬ�������෴������˲���ԣ���˲Ϣ�������ԡ�������GPS������Ӱ����ʱ�䡢�ص㡢���ں��� �����������ұ仯����仯����Ϊ��
1���춥��С����ƽ���——�������50�������ǽ�ֹ�߶ȽDz��ܴ���15°��ԭ��֮һ��
2�����ձ仯——�����ҹ���5������ʱ��һ�������������Һ���ģ�⡣��ˣ�һ������£�����۲�ľ��ȱȰ���ã�����۲�ijɹ�������á�
3������仯——ÿ��11�±�4�´�4����
4����ȱ仯——��Ҫ������̫ �����ӻ������̫�����ӻ��11��Ϊ���ڡ�ÿ��̫�����ӱ���ʱ������Ӱ�����Ķ̲����ߵ�ͨ�ţ�Ҳ���ظ��������źŵĽ��ա����磺2000— 2001����̫�����ӻ�ĸ߷��ꡣ2000��7��20��15�㣬����̨��Ƶ���ڱ������6km������վ���й۲⡣��������£�ֻ��20���Ӽ��㹻����һ ֱ�ӳ���125���ӣ����ջ�ָʾ�ƲŸ�֪��“���ݹ�����Ǩվ��”��ѯ������̫�����ӱ�����
����������������ɢ����ɵĴ���ʱ�Ӽ��ϲ���������������Ӳ㣩�е��ź��������¡�
�Ե������������õ��ǵ��Ӻ��� ��VEC�������ܿռ䣨ȡ���ڸ̺߳�γ�ȣ����ƣ�������ʱ�䣨ȡ����ÿ��ʱ�䡢ÿ���ļ���̫�����ӻ���������ұ仯��̫��������ߺ������ǿ�� �ճ�ǰ�������С����ǿ�ĵ����λ�ڳ��������γ��±30°��Χ�ڣ���С�ĵ�������γ�ȵ�������γ��±��30—65��°֮�䣬�Լ����������� ��γ��±��65—90��°���ڳ����������VEC��ǿ�Ĵ�ռ䷶Χ��ˮƽ�ݶȡ�����GNSS��Զ�λ�о�����Ҫ���壬������λ��˸��С�ռ䷶Χ��ǿ����� ���ţ��������ڳ������������γ�ȵ���ֻ�к�ǿ�Ĵű��������ȣ������ĵ������ų��еȹ�ģ������������γ�ȵ�������Թ۲�ʱ�����20���ӵľ������ ��λ�ܲ�������Զ�λʱ��TEC�Ե�Ƶ���ݵ�Ӱ����Ҫ�ǻ��߳߶ȱȡ���TECΪ![]() ʱ��0.6—0.7ppm[20]������γ�ȵ���̫�����ӻ��Сʱ�����ֵΪ1ppm�����⡣���д����ݶ���ɵ����Ӱ�졣TEC����ʱ���γ�ȶ��仯��������Ϊ����ppm������Ӱ����������������ڳ������������ǿ��ĵ��뻯����ʹ��������ܴ����
ʱ��0.6—0.7ppm[20]������γ�ȵ���̫�����ӻ��Сʱ�����ֵΪ1ppm�����⡣���д����ݶ���ɵ����Ӱ�졣TEC����ʱ���γ�ȶ��仯��������Ϊ����ppm������Ӱ����������������ڳ������������ǿ��ĵ��뻯����ʹ��������ܴ����
���ߣ�������㶯Ҳ�������������ر�Ӱ���ʱ��۲�ֵ����ˣ������������е��㶯ʱ�������С��10km���۲�ʱ�����10—20���ӣ������꽫������cm�������ӳ��۲�ʱ�䣬������������[25]��
���о�����ֹ�߶Ƚ�Ϊ0—15°ʱ���������������20°�����Ѹ�ټ�С��L2Ƶ�ʵĵ��������L1Ƶ�ʴ�[14]��������������ֹ۲�ֵ��Ӱ�����2��
��2�����������ֹ۲�ֵ��Ӱ��
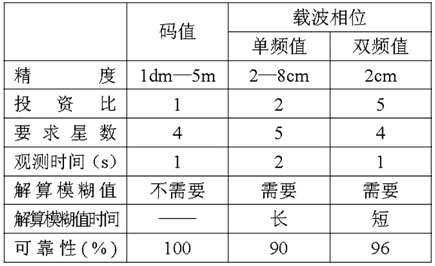
GNSS��Զ�λ�У�Ϊ���������������Ӱ�죬������ѡ�����з�����
1�������ʱ���߳��˶̲��˳�������ȫ���߳���Լ���ȡ�
2���߽ϳ�ʱ��˫Ƶ�����������������������Ч�ķ��������ǣ�˫Ƶ���û���Ӧע���������㣺
- ��������������Զ�λ��Ӱ���Сʱ����˫Ƶֵ��
- ˫Ƶ����ֵ��Ҳ��֮��������Ķྶ���۲�����������ˣ���һЩӦ������ֻ���ڶྶ���Ͳ�����������Сʱ��˫Ƶ������������ġ�����Ӧ�������
- С�ռ䷶Χ�ĵ�����㶯�ή�ͽ��ջ��IJ������ܣ���������������������ʱ������ݶ�ʧ��
3���õ�Ƶ���۲�ʱ���ڼ����ﷶΧ���������ľ��ȣ�����˫Ƶ����õ����ꡣ
4�����õ����ģ��——�����ģ�ͷ�Ϊ���ࣺ����ģ�ͺ�����ģ�͡�ǰ���ɳ��ڹ۲����ݵ�����Ŀǰͨ�õ�“���ʲο������ģ��”���ھ���ģ�͡�����ģ����������ԭ���ݱ������������ŵ����ܹ�ʵʱ�۲�����ĸ�������������Ӱ�켰�仯��ȱ����̫���ӣ������ձ�Ӧ�á�
���õ����ģ��ʱӦ��������ʹ�� Ԥ��ģ�͡���Ϊ�����ɴ��ھ�˲ʱ�仯��TECȡ��ƽ��ֵ�ó����ܲ�ȷ���������ھ�����λ��λ������ʹ����˫Ƶ�۲�ֵ����������ʵ��ģ�͡�Ϊ�ˣ���ʹ�� ��۲�ֵ��˫Ƶ������۲�ֵ����ʱ��֮�����ͬTEC�����ȣ����DZ���ͬ�����Ĵ���ʱ�Ӽ����ջ����������˴���ʱӦ�ڴ���������һ�����㣬����ü춨ֵ [21]��
���������
�ߴ��������9—16km�Ĵ��� ���Ϊ�����㣬��ƽ���߶�12km�����ϱ�������9km���ڳ����Լ16km���������������������ɢ���ԵĴ���ʱ�Ӽ��ź����´����㣨�������ͬ�� �㣩�б����������𡣶���������Ϊ�ɷ�����ʪ���������֣�ǰ��ȡ������ѹ�����£������������ˮ��������ˮ�������иɷ���ռ������90%����ֻռ��С�� �ռ䣬���ұ仯С����ʪ�����ܸ��õ�ģ�⡣
�ڴ�������ʱ������������ͨ����������ģ�����Ի������������ò�վʵ���������ݴ���ʱ�����ڵط��������쳣��һ�㶼�ò������ý����
ʪ����ʱ���ڶ��������������� ���á�Ŀǰ���ⶨʪ���������������“ˮ�������ǣ�WVR�������ڸ����Ǹ���վ���á���WVR������ʵ�ʶ���������ıȽϱ������ڵ߶Ƚ� ʱ��Herringģ�ͺ�Niellģ��[13]�ó��Ľ����������ʹ�õ�ģ�ͣ����磺Saastamoinen[19]�� Good/Goadman[9]��Black[5]�õöࡣ
�����ɱ�ģ�͵ó�������ģ�� ����IJ�����ͨ����Զ�λ��һ��ɼ�СЩ����С�ռ䣨��20km����С�߲��100m���IJ������ԣ���û�нϴ�������ݶȡ�ʪ���ݶȺͷ������µ��� ���£�������в�ԼΪmm�������ڴ�ռ䡢��߲�ͷ������������£�����������Ӱ�콫��úܴ�����dm�������Һܸ��ӣ���� [12��17��18��36��37]��
δģ���δ�����Ķ����������Ӱ��̷߳�����ÿ1mm��Բ�����ʹ�̲߳���3mm�����[20]��
�����ֺ������ͽ����ȵı��μ�⡢��ɽ������̵ĸ̲߳ⶨ����Ҫ���ܲⶨ���߲��Ӧ���Ӷ���������Ӱ�졣Ϊ�ˣ����ݾ����������ѡ�����д�ʩ��
1���������Ǹ���վ��CORS����վ…���˲���WVR���ܲⶨ��������
2����Ҫ����߲�ⶨ���ȴﵽ1cm�ߣ�ѡ����ջ�ʱӦ�춨�������������ģ�͵ľ��ȡ��춨��������͵�������Ӧ���Ʋ�����
3����ѡ����������ȶ���ʱ��۲⣬�����ڲ�ͬ���ڹ۲��Ρ�
4��������ʱ��ͬ���Ǹ߶Ƚ�������ء���ѡ��������ĸ߶Ƚ�ֹ�ǡ�
�ྶ���
����˼�壬�ྶ������������߽��յ��źţ���ֱ���ź��⣬�����������ܵ��Ρ�����ķ����澭һ�λ��η������ļ���źš�����źŲ�����ֱ���ź�·�̳�������ʹ�źŵ��������������仯���Ӷ������źš��������ij̶�ȡ���ڷ���������ԡ����߽������ܺ����߾����ĸ߶ȡ�
������Χ�ĵ��桢б�����ֱ�漰�ֲڶ�С��2°��ƽ�棬���ᵼ���źŲ��������䡣�������Ĵ����о�֤�����ྶ����������������
1���ྶ����Ӱ���źŵı����ҲӰ������ز���λ�Ĺ۲�ֵ���ྶ����Ӱ�죺��۲�ֵΪ��dm—m�������ز���λ�۲�ֵΪ��mm—cm������P��۲�ֵ���ز���λ�۲�ֵ��������������
2���ྶ�����������Ժ����� �������֡�������ȡ����������Χ�ĵ��ε���ո�һ�գ��ظ����֡���ʹ�����۲����Ҳ�����������ڶྶ����·�ߵı仯����վ���㣩�Ķྶ������ǿ�� �������ԡ���������ԣ��������������֮��ľ���С�ڼ���ʱ�������������Сʱ��[8]������������ͨ���ӳ��۲�ʱ���������������ǣ����ö�̬������ RTK…ʱ����Ȼ�������ྶ��
3����ʱ����۲�ֵ�ᷢ��ͻȻ�仯����������������ͬʱ����λ�۲�ֵȴ������С�����[1��23]��
4���ྶЧӦ���ز���λ�ó��ĵ�λ���������һ��ķ���������Ϊ±��1—5��cm���ڸ߷��������¿ɴ�±19cm��
5��P��۲�ֵ�Ķྶ�����еȷ���������Ϊ±��1—3��cm���ڸ߷���������Ϊ±��4—5��cm������������λʧ����
6����λ�۲�λ�еĶ��������������ڶྶ���������
7���ڶ�̬�����³����õ�“;�м���”��OTF������ģ��ֵ����ʱ�����źŵĶྶ������ر����ء�
8���ο�վ�Ķྶ����Ӱ����ƶ�վ�ij�ʼ��ʱ�䣬ҲӰ������ο�վ��������
�����������ɼ����ྶ����DZ�������������ϵͳ������������ߣ������ּ�����������֯ʵʩ����ҵ�۲�����ݴ����ĸ���������Ҫ�߶����ӡ�����ʹ���ڽϴ��ϵͳ���Ҳ������Ϊ�ɹ�“�ϸ�”��
Ŀǰ���ɲ�ȡ���з��������ྶ��
- ѡ��——����ѡ�㹤����ѡ�����ʺ����ǹ۲���ĵ�λ���������ʡ�ķ�����
- �߶�——Ӧ�����ܿ����ߵ� ƽ�����ϵķ����������ƽ�����µ�ǿ�������GNSS�ο�վѡ��¥��ʱ����������Ķྶ���ྶ�ݶȵķ��������������߾�¥�����治��5mʱ�������� �����صĶྶ���ü������������Ķྶָ�������������ݶ���۲�ֵ���֣����꾫��ͬ�ྶ���������ء���ˣ��˾������CORS�������ߵĸ߶ȡ�
- ģ��——�����ڹ�����GNSSվ������Χ���ε���ĸ���ʱ���������ʺϱ�վ�Ķྶ���ģ�ͣ������ݴ����м��Թ˼���Ϊ�ˣ�����ܣ�ÿ���ο�վӦ�ڲ�ͬ���ڽ��ж��죨24ʱ���۲⡣
- ������1——��̬�۲�ʱ���ӳ��۲�ʱ�䣬�ٽ�����ʱ���Ķྶ���ȡƽ��ֵ����Ȼ�����ÿ��پ�̬��RTK…�ȶ�ʱ��۲�ʱ����������ʱ��Ӧ���ٹ۲⼸���ӡ����Ƕྶ����������ڡ�
- ������2——�Ժ��о�ྶ������۲�ֵ���ԣ��ɽ����ྶ����С����λ�۲�ֵ����ƽ����ʹ���������������Hatch�˲���[10]��
- ������3——������ز���λ�Ĺ۲�ֵ֮��������۲�ֵ�Ķྶ���[4��11��23]��
- �����߷�——���ж̾���Ķั���ߣ�����֪������֮�����������������ߵ�ͬ���۲����ݿ�����ྶ���[15��27]��
- ����Ȧ����——������Spitzberg�״�����Ȧ���ߺ�ʹ�ྶ���õ��ϴ����������ǣ���������ƽ���Ϸ������źŲ�������[29]��
- խ�������——���ջ��ڵIJ��������в���һ���������������Ϊ�źŻ�Ƭ���ȵ�1/10——1/20���������Ϊ8Mh�����
- MEDLL����——MEDLL�⼴����ྶʱ�����������������Ŀ��ߵ�10�������ּ������������غ������Ӷ�ȷ������·���źŵ�Ӱ��[24]��
- ��������——ԭ������MEDLL������Ƶ�������……�ȡ�
��������������������̹۲�ʱ��ķ���չ�������ྶ������Ҫ�Խ��������ӡ�Ե�μ����ӵĹ۲��������Ա�֤1—2cm�ľ��ȣ��ྶЧӦ����Ҫ���Դ��
������λ���ı仯��PVC��
���ջ����ߵļ�����λ�����������λ ���IJ����ϸ��غϡ��Ӷ����������ĵ�����λ�����������ź����䷽��ĺ������ھ��ܲ����������У���������֮��ľ����mm��cm������ˣ���Ҫ��1cm�� �ȵĶ�λ�����б�����Թ˼������⣬L1��L2����λ����Ҳ�DZ˴˷ֿ��ġ����ߣ��������ʱҪʹ�ù˼�����������������ֵL0�����㣬�Ӷ�ʹ������� ����ü�����
������λ���IJ����������źŵķ���� �߶ȷ����仯������ʹ������������Ҳ��������λ���ķ����仯[6��16]��Ϊ����PCV�Զ�λ����Ӱ�죬��ҵ�й涨���߱�����ƽ��ָ�������˷��Գ� ���߲������á���Ϊ���ؽ��������źŵĸ߶ȽǺͷ�λ����ȫ��ͬ����ʱ�����ߵ���Լ춨ֵ�Ͳ������ˣ���Ҫ���Լ춨ֵ[22]��
����PCV�춨����ԣ����⣩�춨�� ���ԣ����ڣ��춨���֡�Ӧ���ú��ַ�������Ҫ���ݾ���Ҫ���Ͷ�ʴ�С������ԭ���ϣ���Լ춨ʱ��������֮��ľ���С��10m����ʹ������������ ����������Ӱ�������С������ʱ��Ӧ����24Сʱ���Ա������������Ǹ��ǣ�ʹ�������ﵽmm�����ȡ��ྶЧӦҲ�ܴ����ϴ�����ʹ��ʱ��۲�ȡƽ ��ֵ��Ҳ���ܽ���������
���Լ춨ʹ������Ӱ�ǣ��ɲⶨͬ�߶ȽǺͷ�λ���йص�PCV[22]�����ο�վ�о��Լ춨ֵʱ���ƶ�վҲ�ɵó����Լ춨ֵ��������߲�����ת��������б������1�����պ��ظ��۲⣬����Ұ���ͬ���۲⣬Ҳ�ܴﵽ��һ�������ྶ����Ŀ��[32]��
��CORS�����ԣ����ߵ���Լ춨Ҳ���ѹ��á�������CORS��ʱ����������춨�豸��Ҫ�Ե���ʶ����Ϊ��Խ��Խ��ĸ�������ͬʱ��������ҵ�����⣬CORS���ڳ���ͬʱ�ж���Ȧ����������ֵĶ���Ȧ���ߵ��ƶ�վ��������ҵ��
����
��ѧ���������������ˡ��ڿƼ�Ѹ�ͷ�չ�Ľ��죬˭�ĿƼ������ߣ�˭���ߵ�����ǰ�С���֮����……��
���ҹ�CORS����ȡ�þ�ɾ͵Ľ� �죬ҲҪ����GNSS����������ۣ��ر���ϵͳ����Ϊ�Թ�����“�κβ���ֵ�������”����˹������ѧ�ӵ�������ռ�ʱ��Ӧ����������ۡ�żȻ�� ���ι۲�ȡ���������ڽ�������������С������Ϊ�ǡ����ǣ�ϵͳ������෴�������ݱ��������������������⣬��Ӧ�������Դͷ���������й淶�����ѷ� ��ϵͳ��ʵ��֤������ʹ���нϴ�ϵͳ���ijɹ�Ҳ����Ϊ��“�ϸ�”��[37]����ˣ�һ����Ҫ�ڽ���CORS�ĸ�����������ϵͳ����һ������Ҫ�� ���ջ��ļ����У���Ҫ����Ӳ�����飬��Ӧ���������ļ��飻��Ҫ���ӱ�����飬ҲӦ���������飬�����úϸ�Ľ��ջ��μ���ҵ������ȷ������ɹ��ȿɿ����� ��ȷ�����ܾ�������ʷ���飬Ϊ���˳Ƶ���
��Ϣ���⣺GNSS��Զ�λ������ϵͳ���
���ĵ�ַ��http://www.mapping178.com/zhichi-1247.html
�Ķ����ĵ��˻�������
�롰GNSS��Զ�λ������ϵͳ���й����IJ�Ʒ��




- ��һƪ��ȫվ�ǿ��Ʋ���
- ��һƪ��GPS�ڴ�ؿ��Ʋ����е�Ӧ��